Autonomous Excavator Builds Impressive 6-Meter Dry-Stone Wall
ETH Zurich researchers deployed an autonomous excavator, called HEAP, to build a six metre-high and sixty-five-metre-long dry-stone wall. The wall is embedded in a digitally planned and autonomously excavated landscape and park.
The team of researchers included: Gramazio Kohler Research, the Robotics Systems Lab, Vision for Robotics Lab, and the Chair of Landscape Architecture. They developed this innovative design application as part of the National Centre of Competence in Research for Digital Fabrication (NCCR dfab).
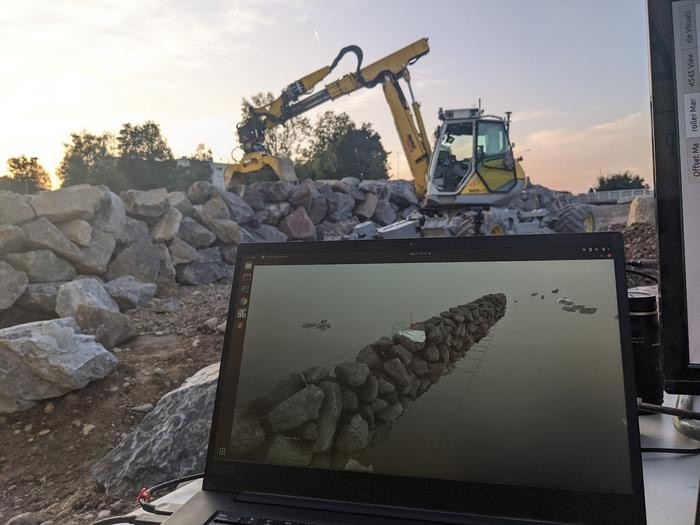
Using sensors, the excavator can autonomously draw a 3D map of the construction site and localise existing building blocks and stones for the wall's construction. Specifically designed tools and machine vision approaches enable the excavator to scan and grab large stones in its immediate environment. It can also register their approximate weight as well as their centre of gravity. An algorithm determines the best position for each stone, and the excavator then conducts the task itself by placing the stones in the desired location. The autonomous machine can place 20 to 30 stones in a single consignment - about as many as one delivery could supply.






From Digital Models to 3D-Printed Homes: Jaspreet Kaur Lall Explains How the Innovation Changes the Construction Industry

Future Belongs to Green Construction: Sampath Kumar Paspunoori Explains One of the Key Trends in the Construction Industry

Kamala Harris' Campaign Ad Uses Iconic Visuals from Carrie Mae Weems to Connect with Voters

Historic Ancient Roman Ruins in Baalbek Remain Strong After Israeli Air Strikes; Locals Seek Cultural Protection

4 Ways to Honor Departed Loved Ones in Your Home Design









